Lower Confidence Bound#
This section demonstrates Bayesian optimization (BO) with lower confidence bound as the acquisition function. This is one of the three strategies presented in this book that combines exploitation and exploration. Specifically, the auxiliary optimization problem is written as:
where LCB is the lower confidence bound and is written as
where \(\mu(\mathbf{x})\) and \(\sigma(\mathbf{x})\) are the model prediction and uncertainty in prediction (standard deviation) from surrogate model, and \(A\) is a constant that controls the trade-off between exploration and exploitation. Larger the value of \(A\), the optimizer will explore search space more. Smaller the value of \(A\), optimizer will exploit the current best solution more. The value of \(A\) is usually set to 2 or 3.
Below code imports required packages and defines modified branin function:
import numpy as np
import torch
import matplotlib.pyplot as plt
from pyDOE3 import lhs
from scimlstudio.models import SingleOutputGP
from scimlstudio.utils import Standardize, Normalize
from gpytorch.mlls import ExactMarginalLogLikelihood
from pymoo.core.problem import Problem
from pymoo.algorithms.soo.nonconvex.de import DE
from pymoo.optimize import minimize
from pymoo.config import Config
Config.warnings['not_compiled'] = False
# Defining the device and data types
args = {
"device": torch.device('cuda' if torch.cuda.is_available() else 'cpu'),
"dtype": torch.float64
}
def modified_branin(x: np.ndarray) -> np.ndarray:
"""
Function for computing modified branin function value at given input points
"""
x = np.atleast_2d(x)
x1 = x[:,0]
x2 = x[:,1]
a = 1.
b = 5.1 / (4.*np.pi**2)
c = 5. / np.pi
r = 6.
s = 10.
t = 1. / (8.*np.pi)
y = a * (x2 - b*x1**2 + c*x1 - r)**2 + s*(1-t)*np.cos(x1) + s + 5*x1
return np.expand_dims(y,-1)
lb = np.array([-5., 0.])
ub = np.array([10., 15.])
/home/pavan/miniconda3/envs/sm/lib/python3.12/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
from .autonotebook import tqdm as notebook_tqdm
Below code block defines pymoo problem class and initializes differential evolution algorithm:
class LowerConfidenceBound(Problem):
def __init__(self, gp, lb: np.ndarray, ub: np.ndarray, A: int = 2):
"""
Class for defining auxiliary optimization problem that uses
lower confidence bound as the acquisition function
"""
# initialize parent class
super().__init__(n_var=lb.shape[0], n_obj=1, n_constr=0, xl=lb, xu=ub)
self.gp = gp # store the surrogate model
self.A = A
def _evaluate(self, x, out, *args, **kwargs):
# convert to torch tensor
x = torch.from_numpy(x).to(self.gp.x_train)
# get mean prediction
y_mean, y_var = self.gp.predict(x)
# store the objective value as numpy array
out["F"] = y_mean.numpy(force=True) + self.A * y_var.numpy(force=True)**0.5
# Optimization algorithm
algorithm = DE(pop_size=15*lb.shape[0], F=0.9, CR=0.8, seed=1)
LCB loop#
Below code implements BO loop with lcb-based acquisition function. Four initial samples are used with a maximum function evaluation budget of 12. This implies that there will be 8 iterations of the loop. The initial samples are generated using latin hypercube sampling. A Gaussian process model is used to approximate the modified Branin function since it provides both point-prediction and uncertainty in prediction.
# variables
A = 2
num_init = 4
max_evals = 12
num_evals = 0
# initial training data
x_train = lhs(lb.shape[0], samples=num_init, criterion='cm', iterations=100, seed=1)
x_train = lb + (ub - lb) * x_train
y_train = modified_branin(x_train)
# increment evals
num_evals += num_init
idx_best = np.argmin(y_train)
ybest = [y_train[idx_best]]
xbest = [x_train[idx_best]]
print("Current best before loop:")
print("x: {}".format(xbest[-1]))
print("f: {}".format(ybest[-1]))
print("\nLCB Loop:")
# loop
while num_evals < max_evals:
print(f"\nIteration: {num_evals-num_init+1}")
# GP
gp = SingleOutputGP(
x_train=torch.from_numpy(x_train).to(**args),
y_train=torch.from_numpy(y_train).to(**args),
output_transform=Standardize,
input_transform=Normalize,
)
gp.num_outputs = 1
mll = ExactMarginalLogLikelihood(gp.likelihood, gp) # marginal log likelihood
optimizer = torch.optim.Adam(gp.parameters(), lr=0.01) # optimizer
# Training the model
gp.fit(training_iterations=1000, mll=mll, optimizer=optimizer)
# Find the minimum of surrogate model
result = minimize(LowerConfidenceBound(gp, lb, ub, A), algorithm, verbose=False)
# Computing true function value at infill point
y_infill = modified_branin(result.X)
print("New point (based on LCB):")
print("x: {}".format(result.X))
print("f: {}".format(y_infill.item()))
# Appending the the new point to the current data set
x_train = np.vstack(( x_train, result.X.reshape(1,-1) ))
y_train = np.vstack((y_train, y_infill))
# increment evals
num_evals += 1
# Find current best point
idx_best = np.argmin(y_train)
ybest.append(y_train[idx_best])
xbest.append(x_train[idx_best])
print("Current best:")
print("x: {}".format(xbest[-1]))
print("f: {}".format(ybest[-1]))
ybest = np.array(ybest)
xbest = np.array(xbest)
Current best before loop:
x: [-3.125 5.625]
f: [28.46841701]
LCB Loop:
Iteration: 1
New point (based on LCB):
x: [-3.12499823 5.62495876]
f: 28.468915117893424
Current best:
x: [-3.125 5.625]
f: [28.46841701]
Iteration: 2
New point (based on LCB):
x: [-3.1753687 6.773826 ]
f: 15.690751987485676
Current best:
x: [-3.1753687 6.773826 ]
f: [15.69075199]
Iteration: 3
New point (based on LCB):
x: [-3.28811933 8.95917846]
f: -2.4655274829608427
Current best:
x: [-3.28811933 8.95917846]
f: [-2.46552748]
Iteration: 4
New point (based on LCB):
x: [-3.37441326 10.45768278]
f: -10.532399501389037
Current best:
x: [-3.37441326 10.45768278]
f: [-10.5323995]
Iteration: 5
New point (based on LCB):
x: [-3.56356411 13.43766998]
f: -16.561899864887906
Current best:
x: [-3.56356411 13.43766998]
f: [-16.56189986]
Iteration: 6
New point (based on LCB):
x: [-3.56334932 13.43454004]
f: -16.562314232604642
Current best:
x: [-3.56334932 13.43454004]
f: [-16.56231423]
Iteration: 7
New point (based on LCB):
x: [-3.56228051 13.41888335]
f: -16.564188640570137
Current best:
x: [-3.56228051 13.41888335]
f: [-16.56418864]
Iteration: 8
New point (based on LCB):
x: [-3.55971155 13.38114783]
f: -16.567292915440333
Current best:
x: [-3.55971155 13.38114783]
f: [-16.56729292]
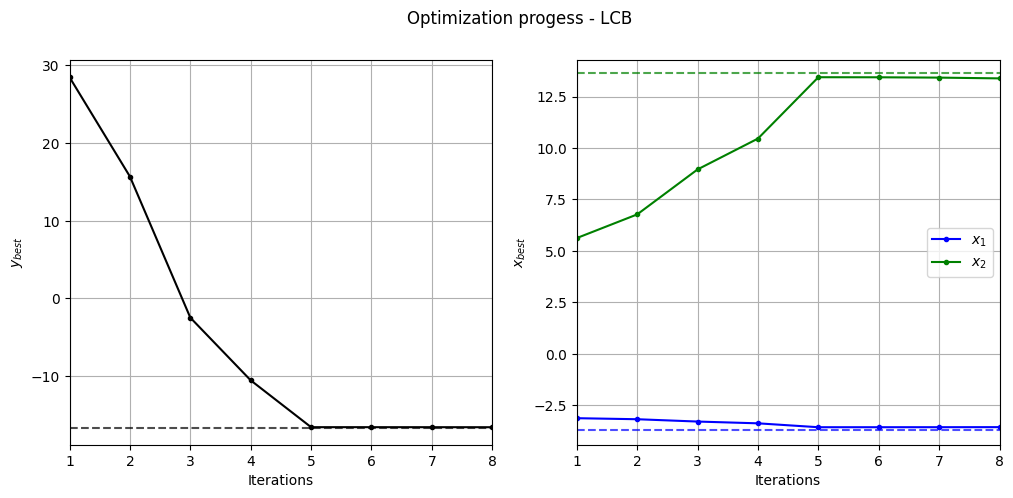
Below code plots the evolution of optimum point with respect to number of iterations:
fig, ax = plt.subplots(1, 2, figsize=(12, 5))
ax[0].plot(ybest, ".k-")
ax[0].set_xlabel("Iterations")
ax[0].set_ylabel("$y_{best}$")
ax[0].axhline(y=-16.64, c="k", linestyle="--", alpha=0.7)
ax[0].set_xlim(left=1, right=ybest.shape[0]-1)
ax[0].grid()
ax[1].plot(xbest[:,0], ".b-", label="$x_1$")
ax[1].plot(xbest[:,1], ".g-", label="$x_2$")
ax[1].axhline(y=-3.689, c="b", linestyle="--", alpha=0.7)
ax[1].axhline(y=13.630, c="g", linestyle="--", alpha=0.7)
ax[1].set_xlim(left=1, right=xbest.shape[0]-1)
ax[1].set_ylabel("$x_{best}$")
ax[1].set_xlabel("Iterations")
ax[1].legend()
ax[1].grid()
_ = plt.suptitle("Optimization progess - LCB")
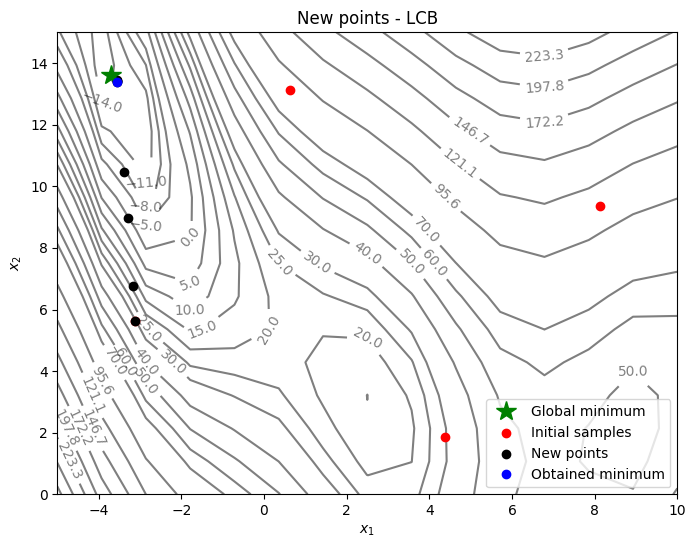
Below code plots the infill points added during the optimization process:
num_pts_per_dim = 15
x1 = np.linspace(lb[0], ub[0], num_pts_per_dim)
x2 = np.linspace(lb[1], ub[1], num_pts_per_dim)
X1, X2 = np.meshgrid(x1, x2)
x = np.hstack(( X1.reshape(-1,1), X2.reshape(-1,1) ))
Z = modified_branin(x).reshape(num_pts_per_dim, num_pts_per_dim)
# Level
levels = np.linspace(-17, -5, 5)
levels = np.concatenate((levels, np.linspace(0, 30, 7)))
levels = np.concatenate((levels, np.linspace(40, 60, 3)))
levels = np.concatenate((levels, np.linspace(70, 300, 10)))
fig, ax = plt.subplots(figsize=(8,6))
# Contours and global opt
CS=ax.contour(X1, X2, Z, levels=levels, colors='k', linestyles='solid', alpha=0.5, zorder=-10)
ax.clabel(CS, inline=1)
ax.plot(-3.689, 13.630, 'g*', markersize=15, label="Global minimum")
# Points
ax.scatter(x_train[0:num_init,0], x_train[0:num_init,1], c="red", label='Initial samples')
ax.scatter(x_train[num_init:,0], x_train[num_init:,1], c="black", label='New points')
ax.plot(xbest[-1][0], xbest[-1][1], 'bo', label="Obtained minimum")
# asthetics
ax.legend()
ax.set_xlabel("$x_1$")
ax.set_ylabel("$x_2$")
_ = ax.set_title("New points - LCB")
As can be seen in above plots, the convergence is much faster than pure exploitation-based acquisition function. But it is hard to know what value of \(A\) to use. You can change the value of \(A\) and see how it changes the optimization convergence.
NOTE: Due to randomness in GP training and differential evolution, results may vary slightly between runs. So, it is recommend to run the code multiple times to see average behavior.